
Guangdong Hinson Technology Co., Ltd.



Manuel utilisateur FE35FB-01000
Ce manuel convient au capteur de balayage laser FE35FB-01000.
Auteur : Hinson Version : V1.00 Date de mise à jour : 16.10.2024
1.1 Remarques sur l'environnement applicable
 La vapeur, la fumée, la poussière et les particules visibles dans l'air peuvent fausser le jugement du capteur, voire le rendre inutilisable.
La vapeur, la fumée, la poussière et les particules visibles dans l'air peuvent fausser le jugement du capteur, voire le rendre inutilisable.
Des techniciens qualifiés doivent vérifier régulièrement si les connexions et les installations du capteur sont correctes.
La durée de vie maximale du capteur est de 10 ans ; après cette période, il doit être remplacé, faute de quoi il risque de ne pas répondre aux normes de performance requises.
Le capteur doit être vérifié et nettoyé régulièrement.
Ce produit ne peut être utilisé que dans les limites spécifiées et dans le respect des paramètres techniques et des conditions de fonctionnement désignés, et ce en tout temps.
1.2 Remarques sur l'environnement de câblage
 N'inversez pas l'alimentation ni ne la connectez à une tension supérieure à la tension de fonctionnement maximale spécifiée, car cela pourrait endommager le capteur.
N'inversez pas l'alimentation ni ne la connectez à une tension supérieure à la tension de fonctionnement maximale spécifiée, car cela pourrait endommager le capteur.
Le branchement de l'alimentation en dessous de la tension de fonctionnement minimale spécifiée entraînera un dysfonctionnement ou un fonctionnement anormal du capteur.
Veuillez suivre les instructions du manuel pour le câblage ; sinon, le capteur risque de ne pas détecter correctement le signal d'entrée.
Ne dépassez pas la capacité de charge du capteur lors du branchement de périphériques à la borne de sortie du signal, car cela pourrait entraîner une défaillance du capteur.
1.3 Remarques sur l'environnement de débogage
Seul le personnel autorisé qualifié est autorisé à connecter, installer, déboguer et configurer le capteur laser.
Assurez-vous que les périphériques associés au capteur sont dans un état d'arrêt fiable.
Assurez-vous que le personnel de débogage est en sécurité.
Assurez-vous que les autres personnes ou objets se trouvent en dehors de la plage active de l'équipement.
2. Introduction de la fonction
2.1 Principales caractéristiques
| Performance | |
Distance de détection |
0,05 m-8 m (@réflectivité 2 %) 0,05 m-35 m (@réflectivité 90 %) |
Angle de détection |
312° |
Fréquence de mesure |
540Khz |
Méthode de mesure |
Technologie de télémétrie par impulsions (PRT) |
Fréquence de numérisation |
12,5 Hz : 750 tr/min (résolution angulaire de 0,025°, 0,05°, 0,1°, 0,25°, 0,5°) 25,0 Hz : 1500 tr/min (résolution angulaire de 0,05°, 0,1°, 0,25°, 0,5°) |
Reconnaissance de la forme de l'objet |
Toute forme, résolution calculée en fonction de la distance de détection |
Résolution de mesure |
1mm |
Précision absolue |
±10 mm |
Bruit de mesure |
±20 mm |
| Interface | |
Entrée de commutation |
4*NPN |
Sortie de commutation |
4*NPN |
CAN |
Bus CAN CAN OPEN *1 |
Ethernet |
TCP/IP (serveur TCP, UDP) 100 M |
Nombre d'échos |
3 |
Données de mesure brutes de sortie |
Pris en charge |
Nombre de protections de zone |
3 |
Nombre de canaux d'évitement d'obstacles |
64 |
| Mechanical/Electrical | |
Tension de fonctionnement |
CC 10-30 V |
Courant de fonctionnement |
125-150mA |
Consommation d'énergie |
< 3,4 W |
Longueur d'onde de la source lumineuse |
905nm |
Classe laser |
Classe 1 (CEI 60825-1 :2014) |
Voyant lumineux |
4*LED (voyant vert d'état de fonctionnement, voyant jaune, orange, rouge d'état de sortie) |
Matière |
alliage d'aluminium, PMMA |
Niveau de protection |
IP65 |
1 |
Capteur laser FE |
1 unit |
2 |
Logiciel de configuration Hinson |
1 set |
3 |
Certificat de qualification du capteur |
1 piece |
Outils logiciels |
Version du logiciel Hinson 1.5.2 ou supérieure |
1 set |
Alimentation |
Alimentation 24 V CC |
1 piece |
Outils |
La configuration de l'ordinateur possède un port RJ45 (ou obtenu par conversion) |
1 piece |
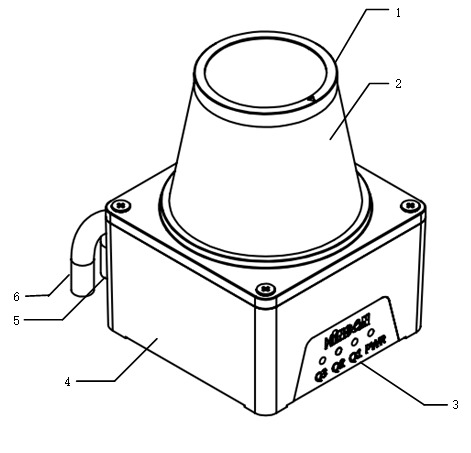
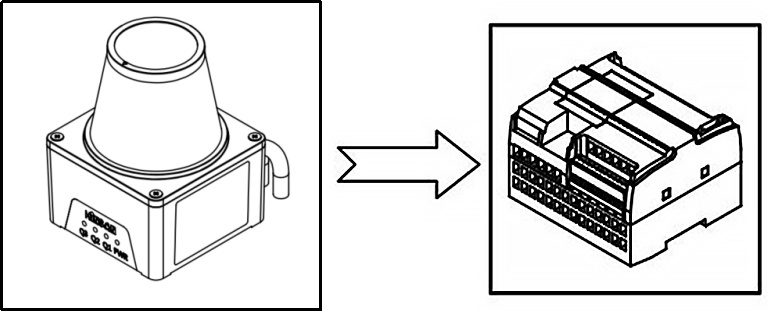
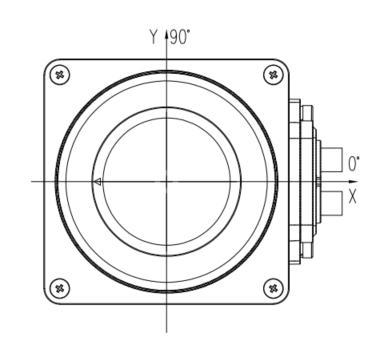
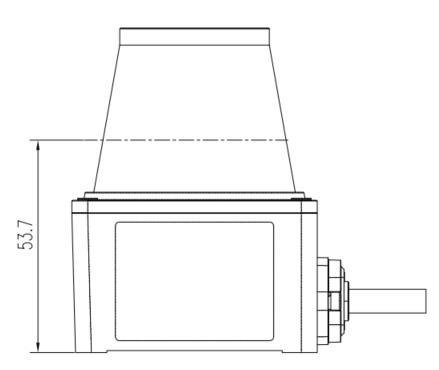
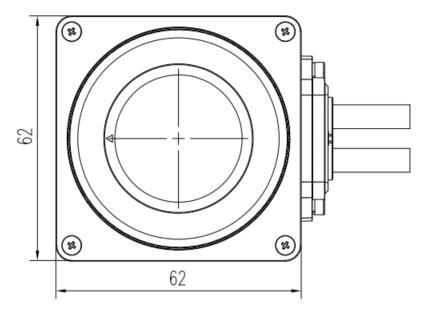
4.2 Description des composants
Numéro de série |
Description de la fonction | Remarques |
1 |
Couverture supérieure | Indiquer la plage de numérisation et la position de l'angle |
2 |
Fenêtre de détection du capteur | Fenêtre de détection du capteur |
3 |
Voyant lumineux | Afficher l'état de fonctionnement |
4 |
Base | Position du trou d'installation |
5 |
Ligne de sortie 1 | Connexion par câble Ethernet |
6 |
Ligne de sortie 2 | Connexion de la ligne d'alimentation et du signal E/S |
4.3 Description du voyant indicateur
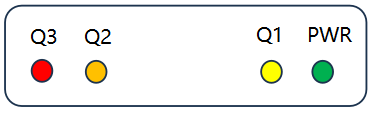
Identification |
Affichage |
Description de la fonction | Instructions d'utilisation |
PWR |
Vert |
Voyant indicateur d'état de fonctionnement | Voyant vert Éteint : le capteur n’est pas alimenté ou ne fonctionne pas correctement ; Allumé : le capteur fonctionne normalement ; Clignotant : le capteur détecte une panne interne, il cesse de fonctionner ; |
Q1 |
Jaune |
Voyant indicateur de sortie OUT1 | Voyant jaune Éteint : le capteur n’est pas alimenté, aucun objet détecté ; Allumé : objet intrus détecté ; Clignotant : le capteur détecte un front de déclenchement ; |
Q2 |
Orange |
Voyant indicateur de sortie OUT2 | Voyant orange Éteint : le capteur n’est pas alimenté, aucun objet détecté ; Allumé : objet intrus détecté ; Clignotant : le capteur détecte un front de déclenchement ; |
Q3 |
Rouge |
Voyant indicateur de sortie OUT3 | Voyant rouge Éteint : le capteur n’est pas alimenté, aucun objet détecté ; Allumé : objet intrus détecté ; Clignotant : le capteur détecte un front de déclenchement ; |
|
|
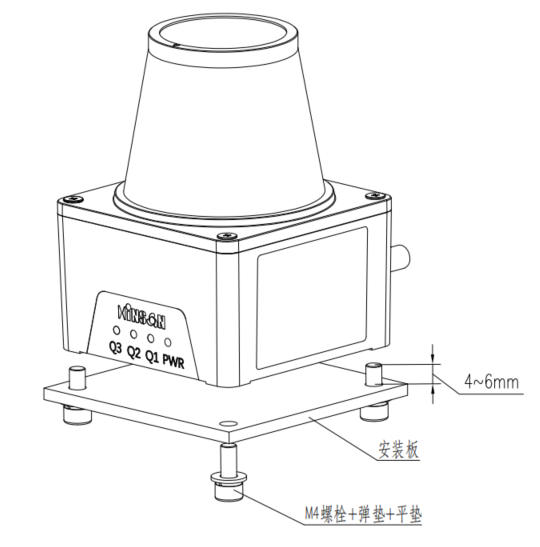
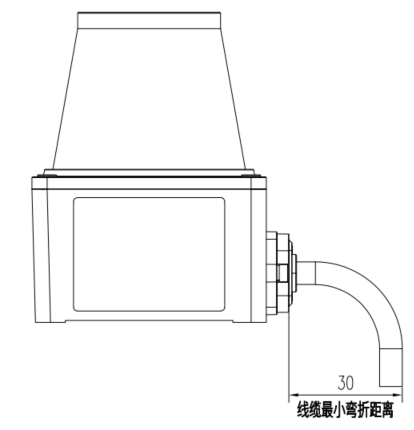
Les vis de fixation doivent être munies de rondelles à ressort pour éviter tout desserrage |
Réserver un espace de 30 mm à l’arrière pour les câbles |
5.1 Ports de quantité d’alimentation et de commutation
| Fonction | E/S, alimentation électrique, communication Ethernet |
| Type | Câbles |
| Caractéristiques des bornes | RJ45, FT10001-F2H |
| Nombre de broches | 14 pins |
| Méthode de sortie | Sortie directe |
Borne |
Numéro de série |
Symbole |
Couleur |
Fonction |
CN3 |
Pin1 |
+VIN |
Brun |
Entrée d’alimentation positive |
Pin2 |
-VIN |
Bleu |
Entrée d’alimentation négative | |
Pin3 |
XCOM |
Brown-white |
Borne d’entrée commune | |
Pin4 |
IN1 |
Noir |
Entrée E/S 1 | |
Pin5 |
IN2 |
Orange |
Entrée E/S 2 | |
Pin6 |
IN3 |
Jaune |
Entrée E/S 3 | |
Pin7 |
CAN_L |
Vert |
CAN_L | |
Pin8 |
CAN_H |
Violet |
CAN_H | |
Pin9 |
IN4 |
Gris |
Entrée E/S 4 | |
Pin10 |
YCOM |
Blanc |
Borne de sortie commune | |
Pin11 |
OUT1 |
White-green |
Sortie E/S 1 | |
Pin12 |
OUT2 |
White-blue |
Sortie E/S 2 | |
Broche 13 |
OUT 3 |
Rouge |
Sortie E/S 3 | |
Broche 14 |
OUT 4 |
Blanc et rouge |
Sortie E/S 4 |
Borne |
Numéro de série |
Symbole |
Couleur |
Fonction |
CN2 |
Pin1 |
ETH TX+ |
Rouge et blanc |
Sortie Ethernet + |
Pin2 |
ETH TX− |
Rouge |
Sortie Ethernet − | |
Pin3 |
ETH RX+ |
Vert et blanc |
Entrée Ethernet + | |
Pin4 |
ETH RX− |
Vert |
Entrée Ethernet − |
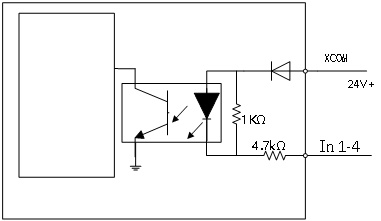
5.2.1 Connexion du signal d’entrée
L’entrée est un signal NPN, utilisant une entrée opto-isolée.
Utiliser une alimentation externe : entrée XC0M DC24V±20 %, supérieure à 100 mA ;
Le capteur possède 16 canaux, dont les signaux d’entrée sont combinés via 4 ports E/S pour commuter vers le numéro de canal spécifié. La plage de détection du canal doit être définie à l’avance via le logiciel de configuration. Les périphériques externes sélectionnent et commutent les régions via des signaux d’entrée.
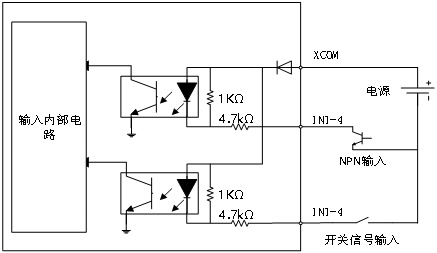
Le capteur FE fournit 4 ports d’entrée pour combiner les signaux.
MARCHE : signal présent ;
ARRÊT : pas de signal ou circuit ouvert ;
| Numéro de canal | IN4 | IN3 | IN2 | IN1 |
| 63 | ARRÊT | ARRÊT | ARRÊT | ARRÊT |
| 62 | ARRÊT | ARRÊT | ARRÊT | MARCHE |
| 61 | ARRÊT | ARRÊT | MARCHE | ARRÊT |
| 60 | ARRÊT | ARRÊT | MARCHE | MARCHE |
| 59 | ARRÊT | MARCHE | ARRÊT | ARRÊT |
| 58 | ARRÊT | MARCHE | ARRÊT | MARCHE |
| 57 | ARRÊT | MARCHE | MARCHE | ARRÊT |
| 56 | ARRÊT | MARCHE | MARCHE | MARCHE |
| 55 | MARCHE | ARRÊT | ARRÊT | ARRÊT |
| 54 | MARCHE | ARRÊT | ARRÊT | MARCHE |
| 53 | MARCHE | ARRÊT | MARCHE | ARRÊT |
| 52 | MARCHE | ARRÊT | MARCHE | MARCHE |
| 51 | MARCHE | MARCHE | ARRÊT | ARRÊT |
| 50 | MARCHE | MARCHE | ARRÊT | MARCHE |
| 49 | MARCHE | MARCHE | MARCHE | ARRÊT |
| 48 | MARCHE | MARCHE | MARCHE | MARCHE |
Rappel : si les 16 canaux ne sont pas tous nécessaires, les signaux d’entrée peuvent être déterminés en fonction du nombre de canaux requis.
Temps de commutation
Une fois que le capteur reçoit le signal de commutation de canal, il y a un délai de commutation dû au cycle de numérisation. Le délai de commutation est indiqué dans la figure ci-dessous.
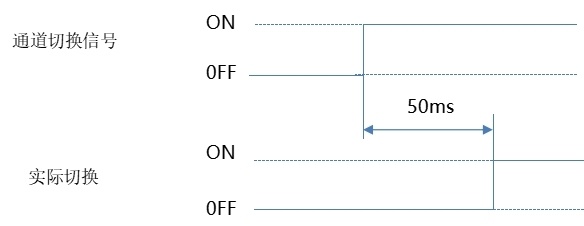
Remarque Lors de la commutation vers un canal sans graphique, le capteur continuera à surveiller l’état du canal graphique précédent ;
5.2.3 Câblage du signal de sortie
Le signal de sortie utilise la fonction
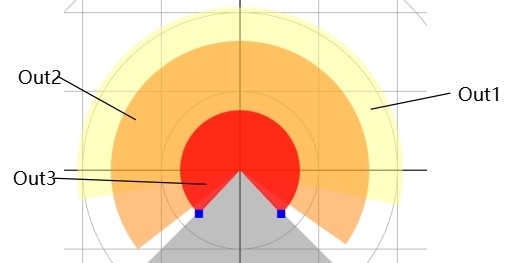
| Port | Fonction | Logique de sortie |
| OUT1 | Utilisé pour l'avertissement et la décélération en cas d'obstacle à distance ; | Par défaut : normalement fermé, peut être modifié en normalement ouvert via le logiciel de configuration ; |
| OUT2 | Utilisé pour la détection et l'arrêt normaux des obstacles ; | Par défaut : normalement fermé, peut être modifié en normalement ouvert via le logiciel de configuration ; |
| OUT 3 | Utilisé pour l'arrêt d'urgence en bout de course ; | Par défaut : normalement fermé, peut être modifié en normalement ouvert via le logiciel de configuration ; |
| ERR | Utilisé pour la sortie d'état de défaut du capteur ; | Par défaut : normalement ouvert, ne peut pas être modifié ; |
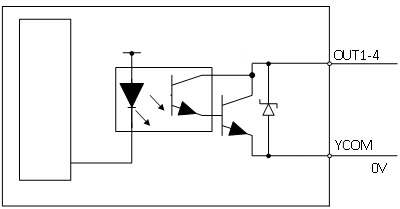
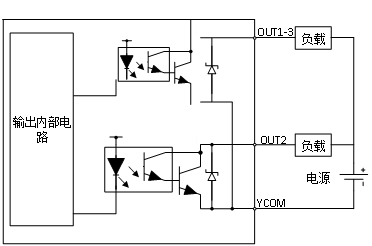
La sortie est un signal collecteur ouvert (NPN), utilisant une sortie opto-isolée, la tension de sortie est de 0 V lorsqu'il y a un signal.
Tous les ports de sortie sont des sorties NPN. Veuillez vous référer au schéma ci-dessous :
|
||
Les ports de sortie du capteur correspondent aux graphiques dessinés dans le logiciel de configuration.
|
||
| Remarque : La sortie de détection ne se produit que lorsque la sortie correspondante possède un graphique dessiné ; | ||
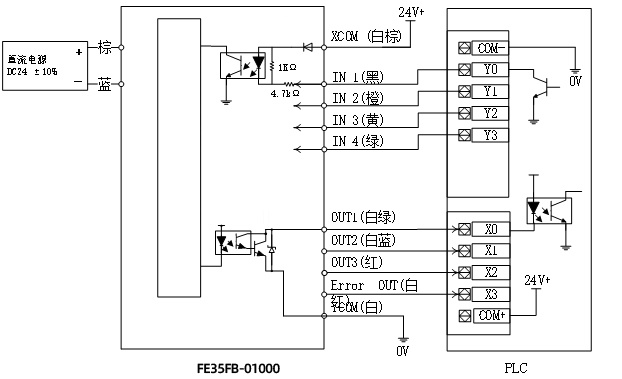
5.2.4 Schéma de connexion
Câblage lorsque les 16 canaux et toutes les sorties sont pleinement utilisés.
|
|
| Automate programmable FE35FB--01000 | |
| La figure montre l'ordinateur supérieur émettant des signaux via des tubes NPN et recevant des signaux. | |
X0-X3 sont les ports d'entrée de signal de l'API ; |
|
| Remarque : Les ports d'entrée et de sortie ne doivent pas être court-circuités ou connectés à des charges dépassant le courant spécifié, sinon cela pourrait endommager le capteur. |
6. Configuration des fonctions
6.1 Préparation du périphérique
| Alimentation CC | Tension | DC10V-DC30V |
| Courant | Supérieur à 1 A | |
| Ordinateur | Système | Windows 7 et versions ultérieures |
| Port | Équipé d'une interface RJ45 ou équipé d'une interface de câble réseau USB vers RJ45 | |
| Résolution | Supérieure à 1280 * 720 |
6.2 Connexion entre le capteur et le logiciel de configuration
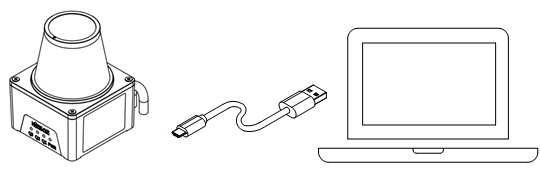
6.2.1 Ouvrir le logiciel de configuration
Décompressez le logiciel de configuration et double-cliquez  Après avoir accédé à l'interface « Liste des périphériques », cliquez
Après avoir accédé à l'interface « Liste des périphériques », cliquez  Accédez à l'interface suivante :
Accédez à l'interface suivante :
Connectez le capteur et le logiciel de configuration en suivant les étapes 1, 2, 3, 4.
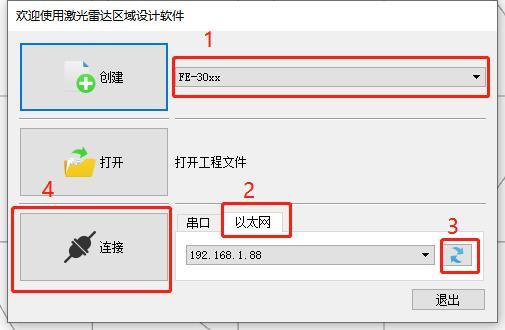
Une fois le capteur connecté au logiciel de configuration, l'interface suivante s'affiche :
Menu principal |
Menu secondaire |
Menu tertiaire |
Icône correspondante | Remarques |
|---|---|---|---|---|
Fichier |
Nouveau fichier |
- |

|
Nouveau fichier |
Ouvrir un fichier |
- |

|
Ouvrir un fichier existant | |
Enregistrer le fichier |
- |

|
Enregistrer le fichier modifié | |
Enregistrer sous |
- |

|
Enregistrer le fichier modifié sous | |
Quitter |
- |

|
Quitter l'interface du logiciel de configuration actuel | |
Édition |
Annuler |
- |

|
Annuler la dernière opération |
Rétablir |
- |

|
Restaurer la dernière opération | |
Copier |
- |

|
Copier le graphique de détection d'un certain canal de détection | |
Couper |
- |

|
Couper le graphique de détection d'un certain canal de détection | |
Coller |
- |

|
Coller le graphique de détection d'un certain canal de détection sur un autre canal | |
Supprimer |
- |

|
Supprimer le graphique du canal de détection actuellement sélectionné | |
Tout supprimer |
- |

|
Supprimer tous les graphiques des canaux de détection | |
Appliquer les paramètres |
- |

|
- | |
Fenêtre |
Fenêtre |
Édition |

|
Cliquez sur l'icône pour afficher la zone de fonction d'édition du logiciel de configuration |
Surveillance |

|
Cliquez sur l'icône pour afficher l'état de surveillance du logiciel de configuration | ||
Paramètres du capteur |

|
Cliquez sur l'icône pour afficher la zone de fonction de réglage des paramètres du capteur du logiciel de configuration | ||
Simulation d'entrée et de sortie |

|
Cliquez sur l'icône pour afficher la zone de fonction de simulation d'entrée et de sortie du capteur | ||
État d'auto-contrôle |

|
Cliquez sur l'icône pour afficher l'état d'auto-contrôle du capteur | ||
Distance |
- |

|
Cliquez pour fermer ou afficher le profil de numérisation à 320° actuel du capteur | |
Intensité |
- |

|
Cliquez pour fermer ou afficher l'intensité de réflexion des obstacles | |
Liste des données |
- |

|
Le logiciel de configuration ne prend pas en charge la sortie des données de distance de tous les points de détection actuels, cet élément n'est pas disponible | |
Paramètres |
Port série |
- |

|
Le capteur ne prend pas en charge la connexion du port série au logiciel de configuration, cet élément n'est pas disponible |
Ethernet |
- |

|
Cliquez pour sélectionner la connexion Ethernet au logiciel de configuration |
|
Paramètres du port série |
- |

|
Le capteur ne prend pas en charge la connexion du port série au logiciel de configuration, cet élément n'est pas disponible |
|
Paramètres Ethernet |
- |

|
Cliquez pour afficher l'adresse Ethernet actuelle du capteur |
|
|
Interface |
Port série |

|
Le capteur ne prend pas en charge la connexion du port série au logiciel de configuration, cet élément n'est pas disponible |
|
Ethernet |
|
||
Connecter |
Connecter le périphérique |
- |

|
Cliquez pour connecter le capteur au logiciel de configuration |
Déconnecter le périphérique |
- |

|
Cliquez pour déconnecter le capteur du logiciel de configuration |
|
Télécharger les données |
- |

|
Cliquez pour télécharger le graphique du canal de détection et les différents paramètres définis pour le capteur |
|
Télécharger les données |
- |

|
Cliquez pour télécharger le graphique du canal de détection et les différents paramètres |
|
Redémarrer le périphérique |
- |

|
Après avoir défini le graphique du canal de détection et ses paramètres, cliquez sur cette icône pour redémarrer le capteur afin que les paramètres prennent effet |
|
Informations sur le capteur |
- |

|
- | |
Affichage |
Affichage du graphique |
- |

|
Cliquez sur cette icône pour afficher le profil de numérisation à 320° du capteur sous forme de graphique plan |
Affichage du nuage de points |
- |

|
Cliquez sur cette icône pour afficher le profil de numérisation à 320° du capteur sous forme de nuage de points |
|
Affichage des lignes |
- |

|
Cliquez sur cette icône pour afficher le profil de numérisation à 320° du capteur sous forme de lignes |
|
Langue |
Chinois simplifié |
- |

|
Cliquez sur cette icône pour afficher le logiciel de configuration en chinois |
Anglais |
- |

|
Cliquez sur cette icône pour afficher le logiciel de configuration en anglais |
|
Aide |
À propos |
- |

|
Cliquez sur cette icône pour afficher les informations de version du logiciel de configuration |
Guide |
- |

|
6.2.3 Icônes de raccourci
Toutes les icônes de raccourci sont expliquées dans la section 1 de la barre de menus.
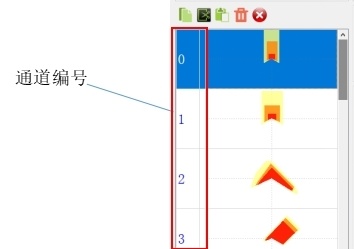
6.2.4 Édition du graphique du canal de détection
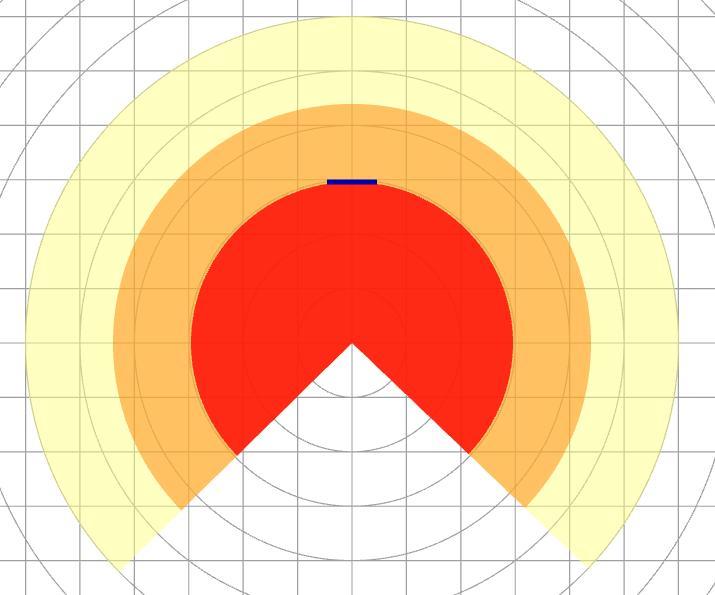
Le capteur prend en charge les canaux de détection 0-63, chaque canal de détection prend en charge 3 sorties graphiques de zone de détection. Le capteur peut sélectionner les canaux via Ethernet et indiquer si des obstacles envahissent les 3 zones de détection du canal.
6.2.5 Édition de la sortie
Mode d'édition du graphique de détection de canal 1, sortie 2, sortie 3.
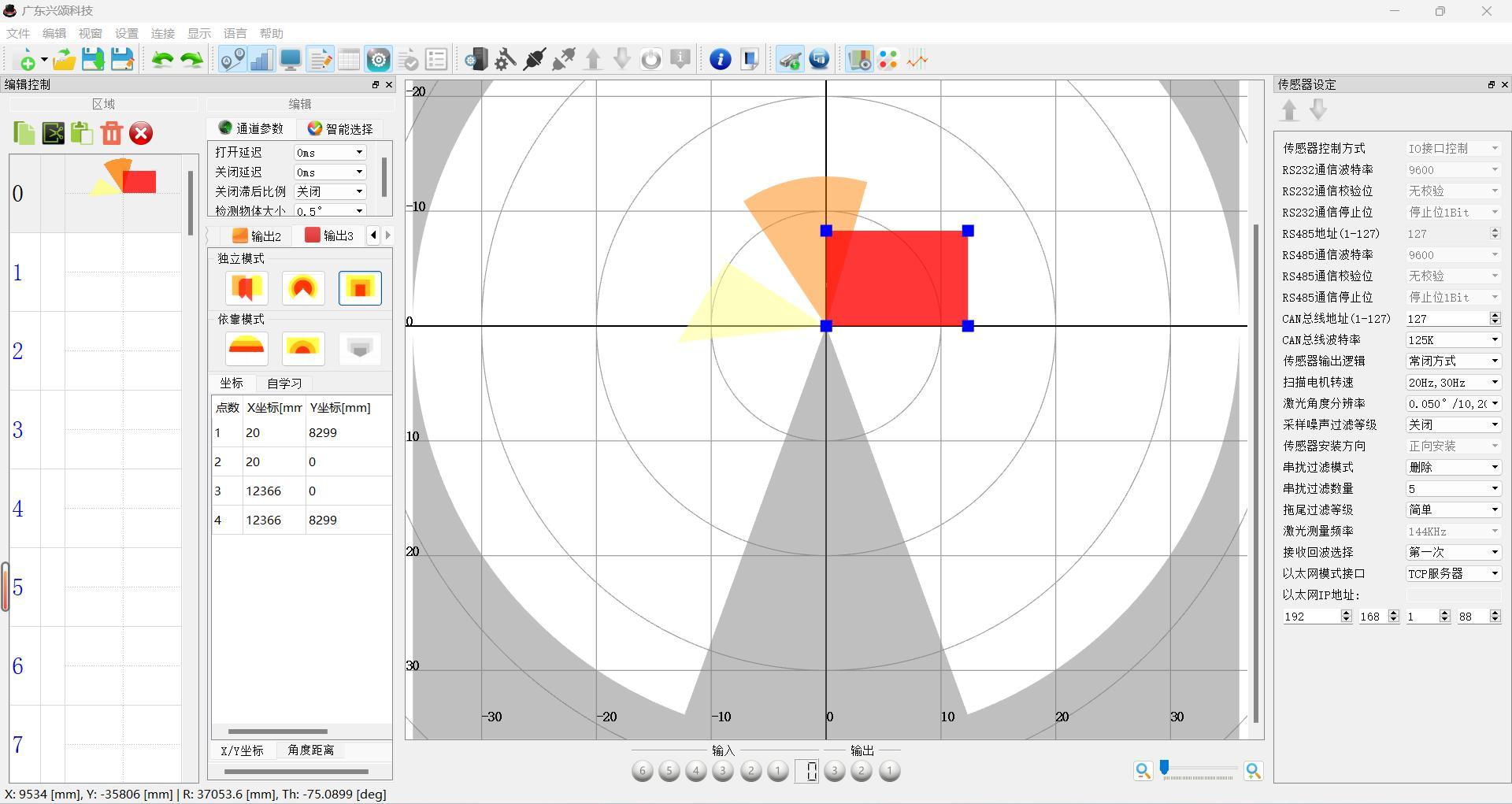
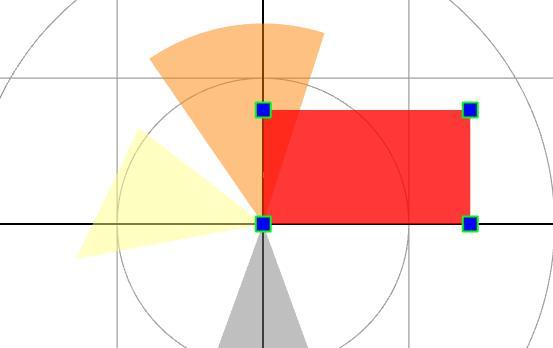
Mode indépendant : en mode indépendant, des formes irrégulières, des secteurs et des rectangles peuvent être définis séparément, les formes irrégulières pouvant comporter jusqu'à 100 points connectés.
Mode dépendant : après avoir défini le graphique de la sortie 1, vous pouvez choisir le mode dépendant pour copier le graphique de la sortie 1 à différentes échelles.
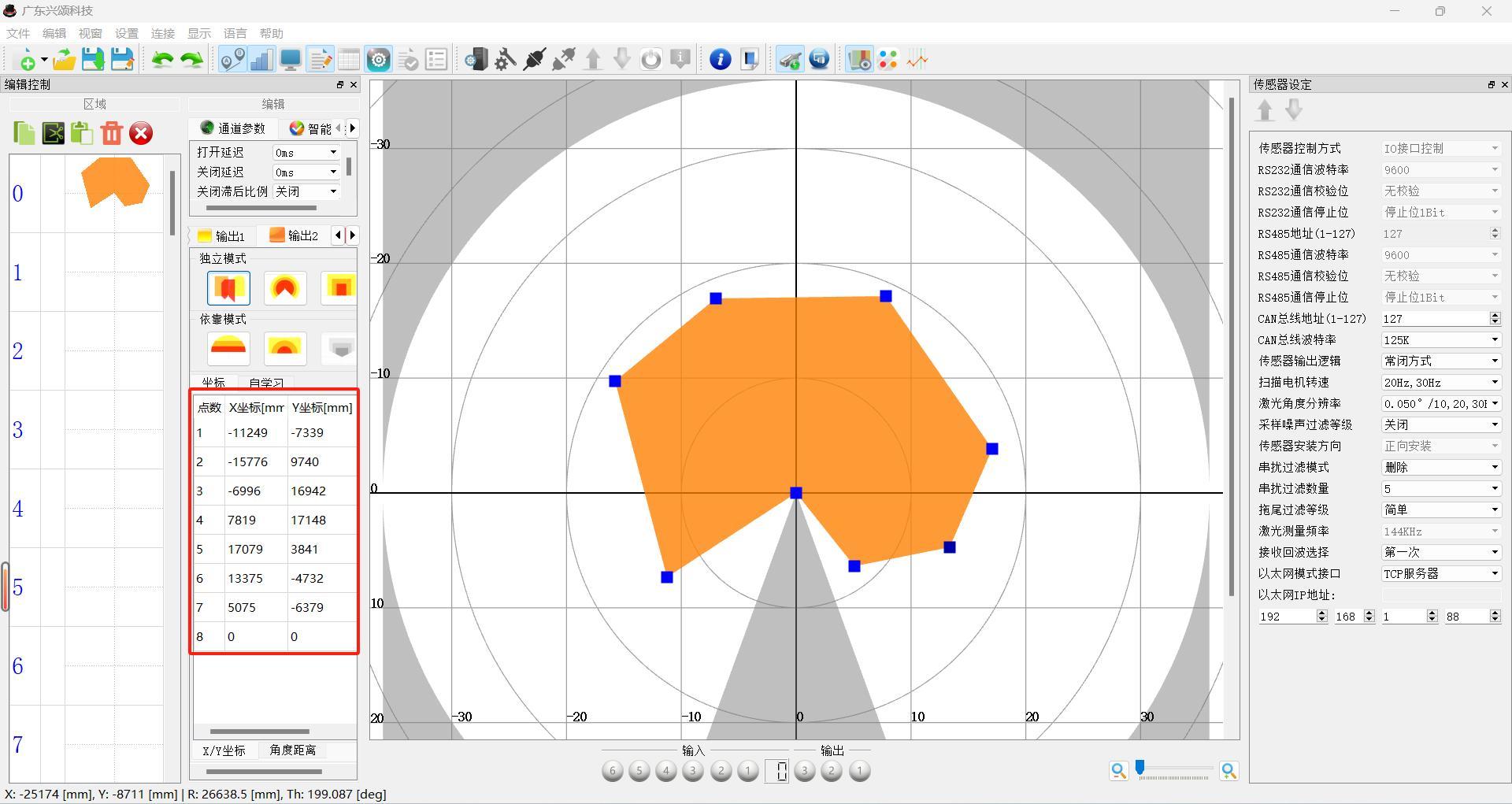
6.2.6 Coordonnées et valeurs d'angle
Coordonnées (X, Y) de chaque point de la forme irrégulière en mode indépendant :
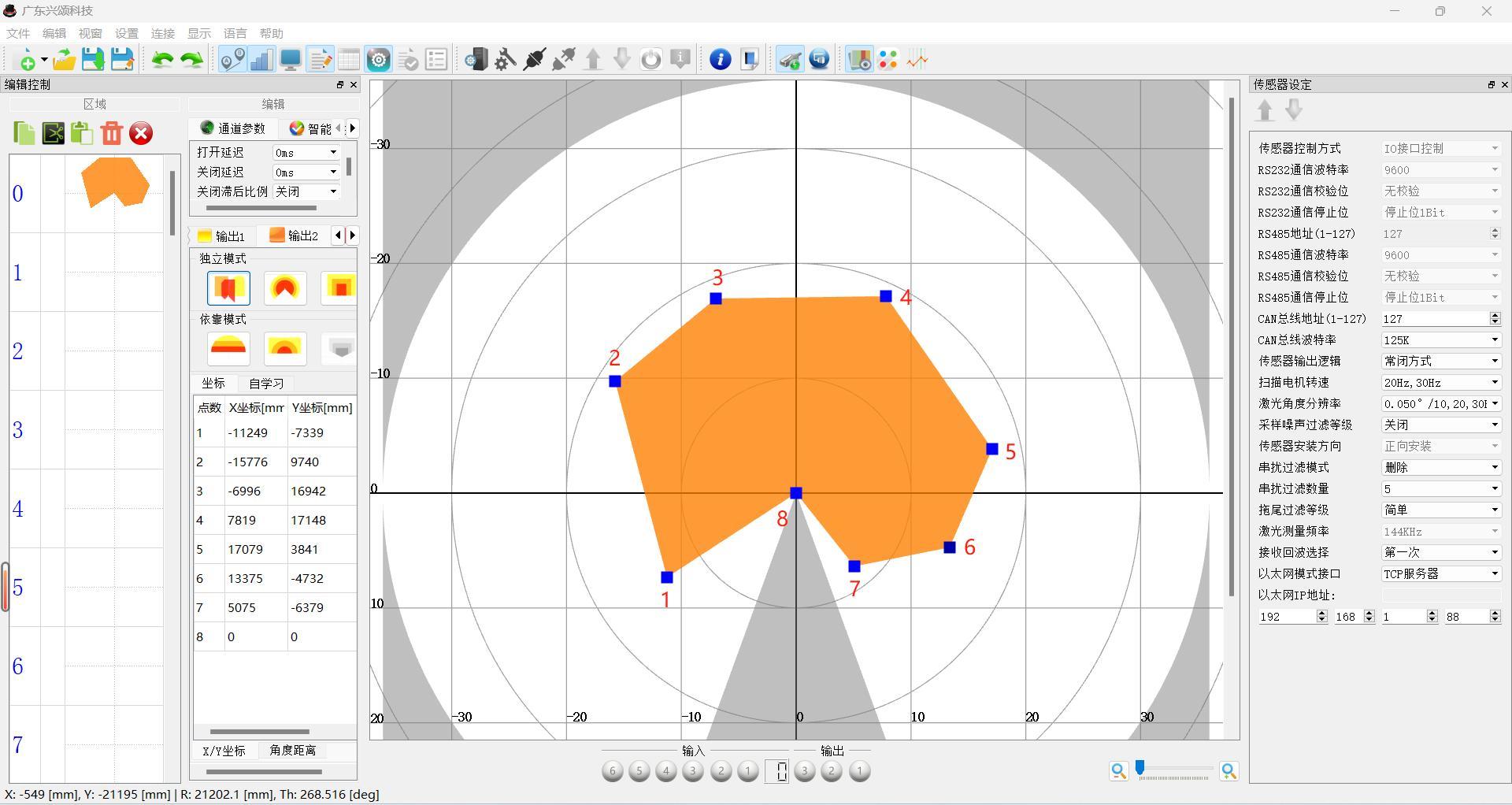
Remarque : le point 8 est l'origine des coordonnées.
Distances et angles de chaque point de la forme irrégulière par rapport à l'origine en mode indépendant :
Remarque : le point 8 est l'origine des coordonnées.
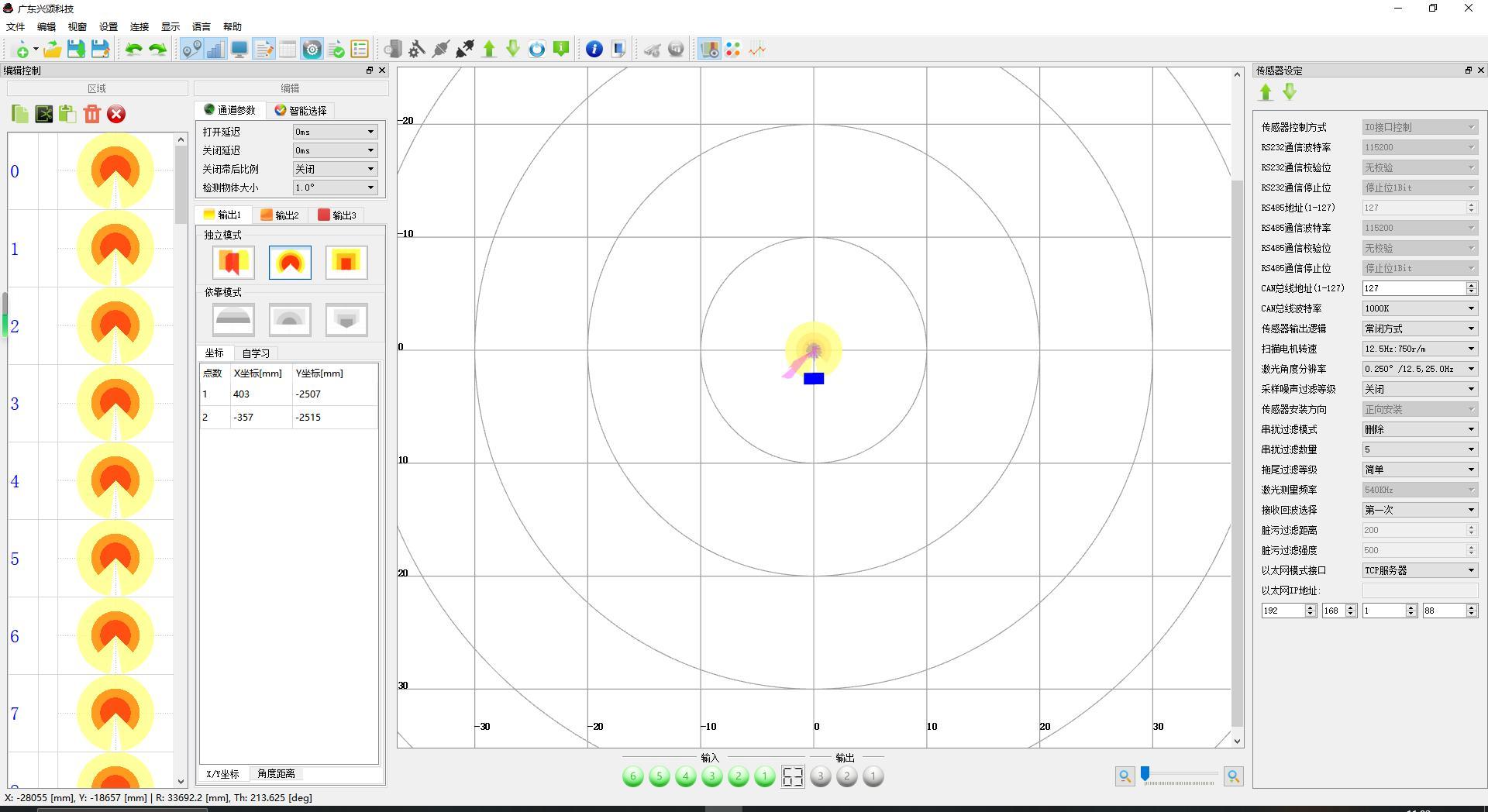
6.2.7 Affichage de l'état de numérisation
Profil de numérisation, intensité de réflexion, zone d'affichage du graphique du canal de détection
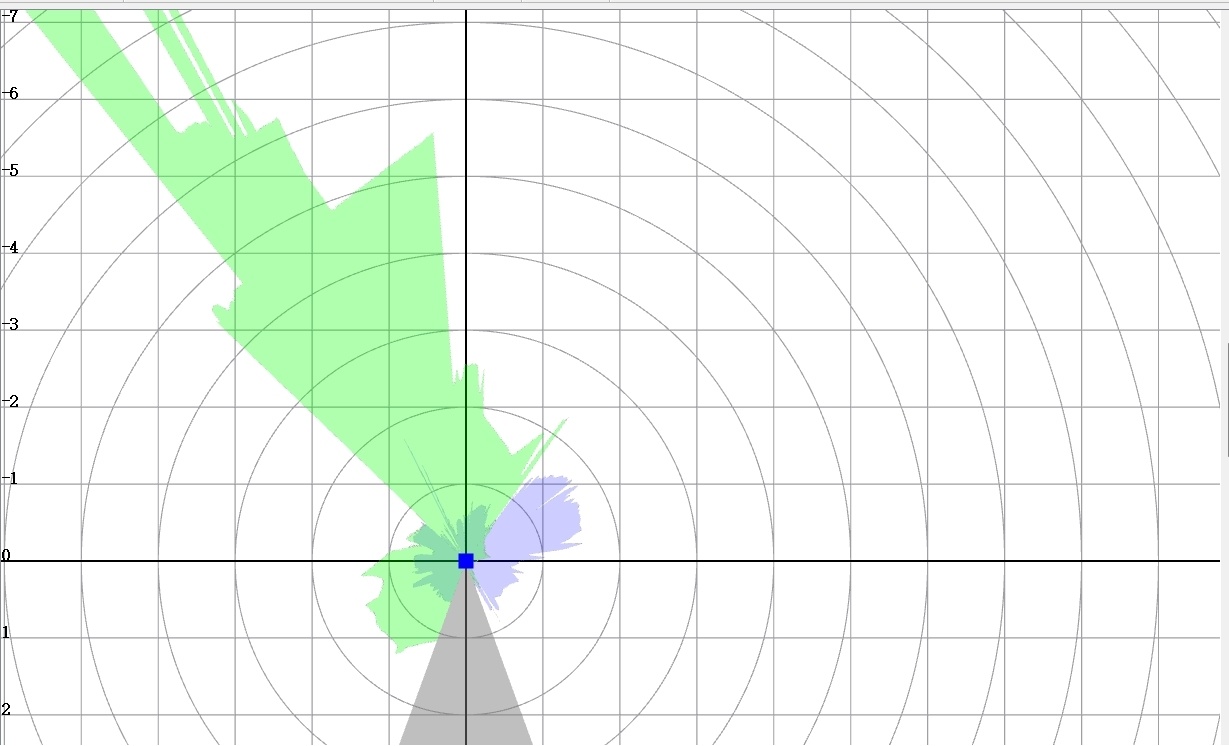
Remarque : 1 La ligne verte indique le profil de numérisation, 2 La ligne bleue indique l'intensité de réflexion.
6.2.8 Surveillance des entrées et des sorties
- 4 entrées de quantité de commutation et 2 sorties de quantité de commutation
- 4 entrées de quantité de commutation sélectionnent les canaux de détection 48-63 (il est également possible de spécifier le canal sélectionné via Ethernet)
- 2 quantités de commutation sortent les signaux d'état de la sortie 1 et de la sortie 3 respectivement.
Liste des paramètres |
Valeur du paramètre |
Remarques |
|---|---|---|
Méthode de contrôle du capteur |
Contrôle de l'interface E/S |
Lors de la sélection du canal du capteur, choisissez parmi E/S, Modbus, Canopen ; un seul peut être efficace en même temps, l'E/S est toujours efficace pendant la sortie. |
Contrôle de la communication Modbus |
Lors de la sélection du canal du capteur, choisissez parmi E/S, Modbus, Canopen ; un seul peut être efficace en même temps, l'E/S est toujours efficace pendant la sortie. Lorsque le contrôle de la communication Modbus est sélectionné, la sortie Modbus est efficace. |
|
Contrôle de la communication Canopen |
Lors de la sélection du canal du capteur, choisissez parmi E/S, Modbus, Canopen ; un seul peut être efficace en même temps, l'E/S est toujours efficace pendant la sortie. Lorsque le contrôle de la communication Canopen est sélectionné, la sortie Canopen est efficace. |
|
Adresse RS485 (1-127) |
1-127 |
L'adresse de communication RS485 1-127 peut être définie. |
Débit de communication RS485 |
9600bps |
Définition du débit de communication RS485 |
19200bps |
||
38400bps |
||
57600bps |
||
115200bps |
||
Bit de parité RS485 |
Aucune parité |
Définition du code de parité RS485 |
Parité impaire |
||
Parité paire |
||
Bit d'arrêt de communication RS485 |
Bit d'arrêt 1 bit |
Définition du bit d'arrêt RS485 |
Bit d'arrêt 1,5 bit |
||
Bit d'arrêt 2 bits |
||
Adresse de bus CAN (1-127) |
1-127 |
L'adresse de communication CAN 1-127 peut être définie. |
Débit bauds du bus CAN |
125K |
Débit bauds du bus CAN |
250K |
||
500K |
||
1000K |
||
Logique de sortie du capteur |
Mode normalement ouvert |
Réglage de sortie du capteur normalement ouvert, normalement fermé |
Mode normalement fermé |
||
Résolution angulaire du laser |
0,025°/12,5 HZ 0,050°/12,5, 25 HZ 0,100°/12,5, 25, 50 HZ 0,200°/50 HZ 0,250°/12,5, 25 HZ 0,500°/12,5, 25, 50 HZ |
Résolution par défaut 0,250° |
Niveau de filtrage du bruit |
Désactivé Simple
Moyen
Strict |
Paramètre de niveau de filtrage du bruit, la valeur par défaut est désactivé |
Sens d'installation du capteur |
Installation avant |
Paramètre actuellement non effectif |
Mode de filtrage de diaphonie |
Désactivé Ajustement Supprimer |
Suppression par défaut. Activer la prévention des interférences pour les autres capteurs |
Quantité de filtrage de diaphonie |
3-8 |
La valeur par défaut est 5, le nombre de points de filtrage ; plus il y a de points de filtrage, meilleur est l'effet anti-interférence, mais il y aura une certaine distorsion dans les parties de bord de l'image. |
Niveau de filtre de traînage |
Désactivé Simple
Moyen
Strict |
Paramètre de niveau de filtre de traînage, la valeur par défaut est simple |
Fréquence de mesure laser |
540KHz |
Fréquence de mesure du capteur, ce paramètre ne peut pas être modifié actuellement |
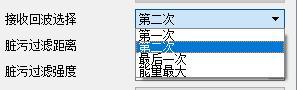
Sélection d'écho |
Première fois Deuxième fois Dernière fois Énergie maximale |
Première fois : mode normal, aucune fonction de filtrage Deuxième fois : sélectionnez le deuxième écho, avec fonction de filtrage Dernière fois : sélectionnez le dernier écho, avec fonction de filtrage Énergie maximale : sélectionnez l'écho avec l'énergie maximale, avec fonction de filtrage La valeur par défaut est la première fois |
Distance de filtrage de la saleté |
0-2000 |
Paramètre de distance de filtrage de la saleté, la valeur par défaut est 200 |
Intensité de filtrage de la saleté |
0-2000 |
Paramètre de distance de filtrage de la saleté, la valeur par défaut est 200 |
Interface du mode Ethernet |
Serveur TCP | Serveur TCP par défaut |
Mode UDP |
||
Adresse IP Ethernet |
Paramètre de l'adresse IP du capteur |
Paramètres multi-échos 6.2.10 (pour FE35FB-XXXXX)
|
|
Première fois |
Mode normal, aucune fonction de filtrage |
Deuxième fois |
Sélectionnez le deuxième écho, avec fonction de filtrage (option recommandée de la fonction d'écho) |
Dernière fois |
Sélectionnez le dernier écho, avec fonction de filtrage |
Énergie maximale |
Recevoir l'écho avec l'énergie maximale |
Remarque : Dans le cas de plusieurs lasers, l'utilisation de la fonction multi-échos et la sélection de la suppression du mode de filtrage de diaphonie entraîneront la disparition de certains nuages de points dans l'image. Veuillez ne pas utiliser les fonctions ci-dessus simultanément. |
|
Description des données du capteur 7.
Système de coordonnées du capteur 7.1
|
|
|
Environnement de filtrage et distance minimale 7.2.1
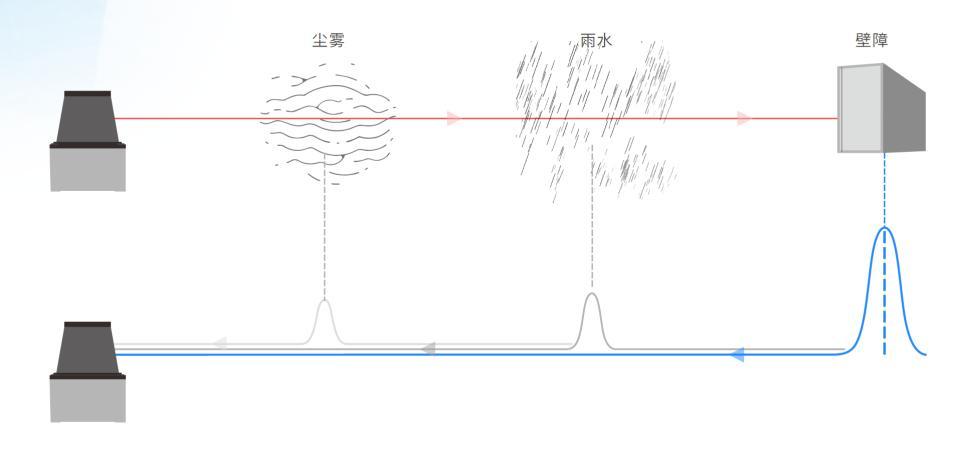
La technologie multi-échos peut détecter plusieurs signaux d'écho pour chaque faisceau de mesure, identifiant ainsi les échos causés par la pluie, la poussière ou des structures complexes pendant le cycle de fonctionnement du faisceau émis, et les filtrant si nécessaire.
Pour afficher les échos comme des valeurs de mesure distinctes, il doit y avoir une distance minimale d'environ 2,5 m entre deux objets.
Impact des surfaces des objets sur les mesures 7.2.2
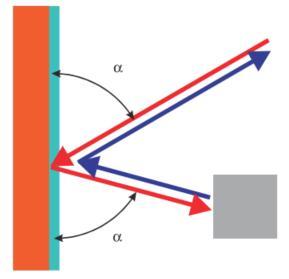
● Surfaces réfléchissantes lisses
Les surfaces réfléchissantes lisses ne peuvent pas être détectées, mais les objets éclairés par la lumière réfléchie par les surfaces réfléchissantes lisses peuvent être détectés.
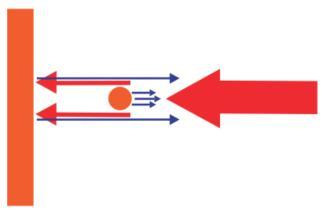
● Détection de petits objets ou aucun objet
Si l'objet détecté est plus petit que le diamètre du faisceau, il se peut que
① La surface du petit objet réfléchit insuffisamment et il n'y a pas d'objets en arrière-plan, donc il ne peut pas être détecté ;
② Le petit objet réfléchit insuffisamment, mais l'objet en arrière-plan réfléchit suffisamment, ce qui entraîne des erreurs de détection ;
③ Le petit objet et l'objet en arrière-plan réfléchissent suffisamment, ce qui entraîne des valeurs de mesure déformées ;
Transmission de données Ethernet 7.3
◆ Paramètres
Ouvrez le logiciel de configuration, entrez l'interface de paramétrage du capteur (côté serveur) et définissez les paramètres suivants.

|
Nom du paramètre |
Valeur du paramètre |
Valeur par défaut |
Mode Ethernet |
Serveur TCP |
Serveur TCP |
|
Mode UDP |
|||
Adresse IP Ethernet |
192.168.1. 1-254
Le dernier octet peut être défini de 1 à 254 Le port du capteur (serveur) est fixe à 8080 |
192.168.1.88 |
Une fois que le client a initié une demande et établi une connexion, la transmission de données commence, selon les règles suivantes :
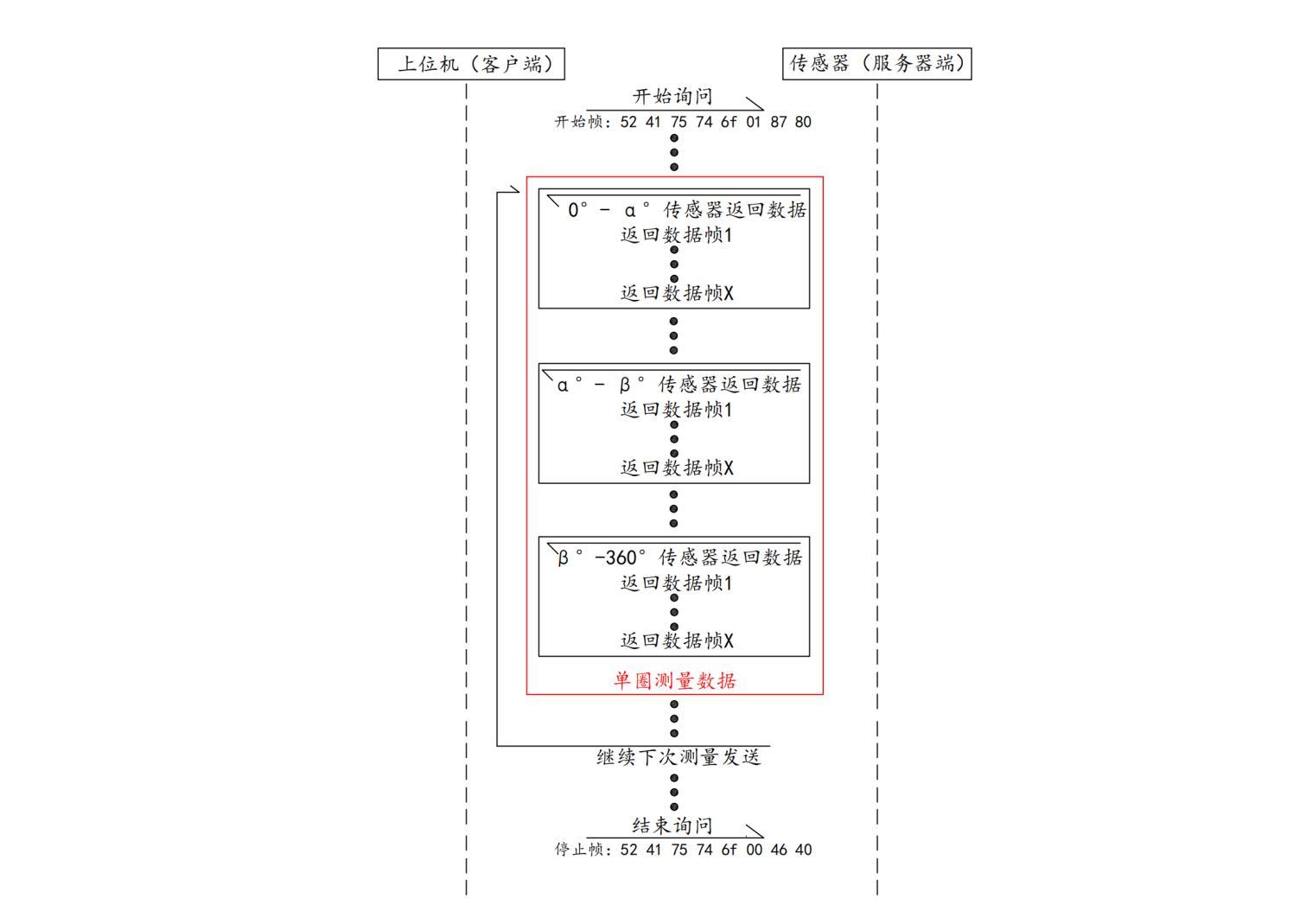
L'ordinateur hôte (client) envoie une trame de données de démarrage au capteur (côté serveur), et le capteur renvoie les données de mesure pour 0°-360° en plusieurs trames. Après avoir renvoyé les données de mesure complètes pour 0°-360° (un total de 360°), le capteur continue d'envoyer les données de mesure suivantes jusqu'à ce qu'il reçoive une trame de données d'arrêt envoyée par l'ordinateur hôte.
- Trame de données de démarrage (Hex)
Structure des données
Code de démarrage
|
Bit de contrôle
|
Bit de contrôle
|
5 B yte
|
1 B yte
|
2 B yte
|
Code de démarrage : Les données fixes sont 0x52 0x41 0x750x740x6F
Bit de contrôle :
0x01 Le capteur commence à envoyer automatiquement les données ;
0x00 Le capteur arrête d'envoyer les données ;
Bit de contrôle : Octet de poids faible en premier, octet de poids fort en dernier, utilisant Modbus-C RC16 Le bit de contrôle calculé par la méthode.
- Trame de données de mesure (Hex)
Structure des données :
En-tête de la trame de données
|
Données de mesure
|
16B yte
|
Longueur variable
|
Format de l'en-tête de la trame de données (Hex) :
Identificateur
|
1 B yte
|
1Byte
|
|
1Byte
|
|
1Byte
|
|
Angle de départ
|
1 octet (octet de poids fort en premier)
|
1 octet (octet de poids faible en dernier)
|
|
Angle de fin
|
1 octet (octet de poids fort en premier)
|
1 octet (octet de poids faible en dernier)
|
|
Nombre total de points de mesure dans la trame de données actuelle
|
1 octet (octet de poids fort en premier)
|
1 octet (octet de poids faible en dernier)
|
|
Numéro de séquence du dernier point de détection dans la trame de données actuelle
|
1 octet (octet de poids fort en premier)
|
1 octet (octet de poids faible en dernier)
|
|
Nombre total de points de mesure de l'angle de départ à l'angle de fin
|
1 octet (octet de poids fort en premier)
|
1 octet (octet de poids faible en dernier)
|
|
Horodatage
|
1 octet (octet de poids fort en premier)
|
1 octet (octet de poids faible en dernier)
|
1. Identifiant (4 B yte) : 0x 48 0 x 49 0 x 53 0 x 4 e
2. Angle de départ (2 B yte) : Angle de départ des données de mesure renvoyées actuellement ;
3. Angle de fin (2 B yte) : Angle de fin des données de mesure renvoyées actuellement ;
4. Nombre total de points de mesure dans la trame de données actuelle (2 B yte) :
En raison des différentes résolutions angulaires, le nombre total de points de mesure dans la plage allant de l'angle de départ à l'angle de fin variera également. Les données de mesure seront renvoyées en plusieurs trames de données dans cette plage. Le "nombre total de points de mesure dans la trame de données actuelle" est la somme des points de mesure renvoyés dans la trame de données actuelle.
5. Numéro de séquence du dernier point de détection dans la trame de données actuelle (2 B yte) :
Par exemple : Le nombre total de points de mesure de l'angle de départ à l'angle de fin est 800 divisé en 2 trames pour renvoyer les données de mesure. La trame de données actuelle renvoie les données pour les points 1 à 400 alors la valeur de "numéro de séquence du dernier point de détection dans la trame de données actuelle" est 400 si la trame de données actuelle renvoie à partir du point 401 à 800 alors la valeur de "numéro de séquence du dernier point de détection dans la trame de données actuelle" est 800.
6. Nombre total de points de mesure dans la plage allant de l'angle de départ à l'angle de fin (2 B yte) :
Le nombre total de points de mesure dans la plage allant de l'angle de départ à l'angle de fin est déterminé par la "fréquence de balayage laser", la "vitesse du moteur de balayage" et le "nombre d'échantillons par point" actuels.
Voici quelques exemples.
7. Horodatage (2 B yte) :
Affiche la synchronisation interne de la trame actuelle envoyée, l'unité de temps est us, la plage d'enregistrement du temps est de 0 à 65 535 us, les données sont effacées après que l'enregistrement est plein.
Données de mesure (Hex) :
Données de mesure du premier point (4 octets) |
Données de mesure du deuxième point (4 octets) |
………………… (4 octets) |
Données de mesure du dernier point (4 octets) |
||||||||||||
Distance de mesure (2 octets) |
Intensité de mesure (2 octets) |
Distance de mesure (2 octets) |
Intensité de mesure (2 octets) |
Distance de mesure (2 octets) |
Intensité de mesure (2 octets) |
Distance de mesure (2 octets) |
Intensité de mesure (2 octets) |
||||||||
L |
H |
L |
H |
L |
H |
L |
H |
L |
H |
L |
H |
L |
H |
L |
H |
L'unité de distance de mesure est le mm, en sortie les données de distance entre le point de réflexion et le capteur.
L'intensité de mesure reflète l'intensité du point de réflexion, les valeurs plus élevées indiquant une meilleure capacité de réflexion de l'objet.
La distance de mesure et l'intensité de mesure sont toutes deux en octet de poids faible en premier, octet de poids fort en dernier.
- Trame de données d'arrêt (Hex)
0x52 0x41 0x75 0x74 0x6F 0x00 0x46 0x40
Une fois que l'ordinateur hôte a envoyé la trame de données d'arrêt au capteur, le capteur cesse de renvoyer les données de mesure.
- Explication de l'exemple
1. Les paramètres du capteur sont définis comme suit :
Interface du mode Ethernet : serveur TCP
Adresse IP Ethernet : 192.168.1.88
Vitesse du moteur de balayage : 12,5 Hz
Port du capteur (serveur) : 8080
Il est important de noter que le port du capteur (serveur) est fixe à 8080, et que l'ordinateur hôte établit avec succès une connexion avec le capteur. .
2. Calcul de la résolution angulaire de mesure :
Fréquence de balayage laser : Nombre de faisceaux laser émis par l'émetteur laser en une seconde, en prenant 432 kHz comme exemple ;
Vitesse du moteur de balayage : nombre de révolutions du moteur rotatif du tube d’émission laser en une seconde, en prenant 12,5 Hz (12,5 r par seconde) à titre d’exemple ;
Temps d’échantillonnage ponctuel : nombre de mesures répétées en un seul point de mesure. En prenant une mesure d’un seul point de détection à titre d’exemple ; 1 fois ;
Résolution angulaire de mesure = vitesse du moteur de balayage * 360° / (fréquence de balayage laser / temps d’échantillonnage ponctuel) = 0. 100°, la résolution angulaire de mesure est automatiquement calculée par le logiciel de configuration et n’a pas besoin d’être définie séparément ;
3. Calcul du nombre total de points de mesure :
Nombre total de points de mesure = (angle de fin - angle de début) / résolution angulaire de mesure, le nombre total de points de mesure est arrondi à une décimale et, selon la conception du capteur, il est divisé en 13 blocs de données de plage angulaire. Cette valeur de plage angulaire est fixe et ne change pas avec la modification de la résolution angulaire. Voir la figure 4 ci-dessous.
Premier angle de début
|
Premier angle de fin
|
Plage angulaire
|
Deuxième angle de début
|
Deuxième angle de fin
|
Plage angulaire
|
Troisième angle de début
|
Troisième angle de fin
|
Plage angulaire
|
Quatrième angle de début
|
Quatrième angle de fin
|
Plage angulaire
|
24 °
|
48 °
|
24 °
|
48 °
|
72 °
|
24 °
|
72 °
|
96 °
|
24 °
|
96 °
|
120 °
|
24 °
|
Cinquième angle de début
|
Cinquième angle de fin
|
Plage angulaire
|
Sixième angle de début
|
Sixième angle de fin
|
Plage angulaire
|
Septième angle de début
|
Septième angle de fin
|
Plage angulaire
|
Huitième angle de début
|
Huitième angle de fin
|
Plage angulaire
|
120 °
|
144 °
|
24 °
|
144 °
|
168 °
|
24 °
|
168 °
|
192 °
|
24 °
|
192 °
|
216 °
|
24 °
|
Neuvième angle de début
|
Neuvième angle de fin
|
Plage angulaire
|
Dixième angle de début
|
Dixième angle de fin
|
Plage angulaire
|
Onzième angle de début
|
Onzième angle de fin
|
Plage angulaire
|
Douzième angle de début
|
Douzième angle de fin
|
Plage angulaire
|
216 °
|
240 °
|
24 °
|
240 °
|
264 °
|
24 °
|
264 °
|
288 °
|
24 °
|
288 °
|
312 °
|
24 °
|
Treizième angle de début
|
Treizième angle de fin
|
Plage angulaire
|
|
|
|
|
|
|
|
|
|
312 °
|
336 °
|
24 °
|
|
|
|
|
|
|
|
|
|
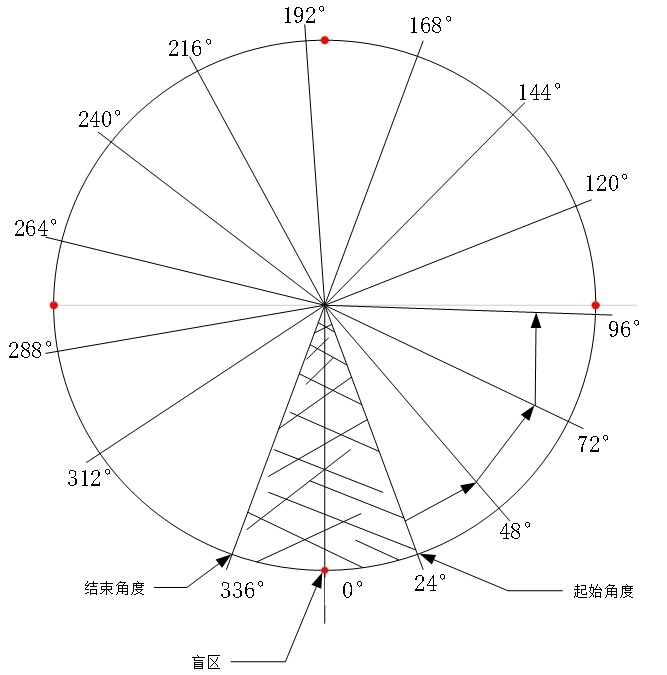
En prenant l’angle de fin de 24°, l’angle de début de 0° et la résolution angulaire de 0,100° à titre d’exemple, le nombre total de points de mesure = (24-0) / 0,100 = 240.
État du capteur et acquisition de données de détection de zone
Après avoir lancé une demande et établi une connexion côté client, la transmission de données commence, en suivant les règles ci-dessous.
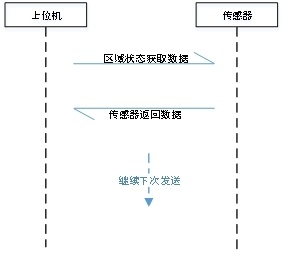
Envoi d’acquisition de données Message
Identificateur de données
|
5 B yte
|
Mode de fonctionnement du capteur |
1 B yte
|
Valeur du canal du capteur
|
1 B yte
|
Valeur de l’angle de commutation en mode de sélection intelligente du canal
|
2B yte
|
Valeur de la vitesse de commutation en mode de sélection intelligente du canal
|
2B yte
|
Numéro du groupe de canaux
|
2 B yte
|
Bit de données non valide
|
3 B yte
|
Bit de contrôle
|
2 B yte
|
- Identificateur de données ( 5 octet)
L’identificateur est fixe Données : 0x57 0x53 0x69 0x6d 0x75 La fonction de ces données ;
- Mode de fonctionnement du capteur ( 1 octet)
00 : Commande non valide
01 : Mode de canal désigné
02 : Mode de sélection intelligente du canal
- Valeur du canal du capteur ( 1 octet)
Contrôle le canal de détection actuel utilisé par le capteur, plage de données 0 0-63;
- Angle du canal du capteur ( 2 octet)
Valeur angulaire en mode groupe de canaux, les données se situent dans la plage de données signées -180 à 180 ;
- Valeur de la vitesse du canal du capteur ( 2 octet)
Valeur de la vitesse en mode groupe de canaux, les données se situent dans la plage de données signées - 300-300;
- Numéro du groupe de canaux du capteur ( 2 octet)
Contrôle le numéro de groupe de canaux de détection actuel utilisé par le capteur, plage de données 0 0 -04 ;
- Données non valides ( 3 octet)
Données non valides, les données par défaut doivent être envoyées 0 x 00;
- Bit de contrôle (2 octets)
Bit de contrôle des données, en utilisant le modbus, octet inférieur d’abord C RC16 Méthode de contrôle. La valeur de contrôle est calculée à l’aide de la formule de contrôle, pour les méthodes de calcul spécifiques, voir l’annexe.
Données renvoyées par le capteur
Identificateur de données
|
5 B yte
|
Valeur du canal du capteur
|
1 B yte
|
Non valide
|
1 B yte
|
État de sortie
|
1 B yte
|
Données non valides
|
1B yte
|
État de défaut
|
1 B octet (H)
|
|
1 octet (L)
|
Température actuelle
|
1 B yte
|
|
1Byte
|
Vitesse du moteur interne
|
1 B octet (H)
|
|
1 octet (L)
|
Tension d’entraînement
|
1 B octet (H)
|
|
1 octet (L)
|
Tension de réception
|
1 B octet (H)
|
|
1 octet (L)
|
Tension d’envoi
|
1 B octet (H)
|
|
1 octet (L)
|
Bit de contrôle
|
1 B octet (L)
|
|
1 octet (H)
|
- Identificateur de données ( 5 octet)
L’identificateur est fixe Données : 0x57 0x53 0x69 0x6d 0x75 La fonction de ces données ;
- Valeur du canal actuel (1 octet)
Valeur du canal actuel du capteur ;
- Données non valides ( 1 octet)
Données non valides ;
- État de sortie ( 1 octet)
B il 7
|
B il 6
|
B il 5
|
B il 4
|
B il 3
|
B il 2
|
B il 1
|
B il 0
|
Non valide
|
OUT 3 |
OUT2 |
OUT1 |
||||
Paramètres associés Logique de sortie du capteur :
Mode normalement fermé (par défaut)
0 0 : Objet détecté ;
01 : Objet non détecté
Mode normalement ouvert
01 : Objet détecté ;
00 : Objet non détecté ;
- Données non valides ( 1 octet)
Données non valides ;
- État de défaut du capteur ( 2 octet)
|
||||||||||||||||||||||||||
Code de défaut du capteur
|
- Température actuelle ( 2 octet)
|
||||
Données signées, plage de données -5000-10000 ; affiche la température interne actuelle du capteur, unité de température 0,01 ℃ ; lorsque la température surveillée dépasse 80,00 ℃, le capteur indique une protection contre les surtempératures ;
|
||||
- Vitesse du moteur interne ( 2 octet)
|
||||
Données non signées, plage de données 0-3000, affiche la vitesse du moteur interne actuelle du capteur, unité de vitesse 1 tr/min ;
|
||||
- Tension d'entraînement ( 2 octet)
|
||||
Données non signées, plage de données 0-1600 ; affiche la tension du moteur d'entraînement du capteur actuel, unité de tension 0,01 V ;
|
||||
- Tension de la carte de réception ( 2 octet)
|
||||
Données non signées, plage de données 0-25000 ; affiche la tension ADP actuelle de la carte de réception du capteur, unité de tension 0,01 V ;
|
||||
- Tension de la carte d'envoi ( 2 octet)
|
||||
Données non signées, plage de données 0-5500 ; affiche la tension actuelle de la carte d'envoi du capteur, unité de tension 0,01 V ;
|
||||
- Bit de contrôle (2 octets)
Bit de contrôle des données, en utilisant le modbus, octet inférieur d’abord C RC16 Méthode de vérification. La valeur de contrôle est calculée à l'aide de la formule de contrôle.
cBuffer : Tableau pour le calcul du code de contrôle CRC.
iBufLen : Longueur du tableau.
unsigned int CRC_Verify(unsigned char *cBuffer, unsigned int iBufLen)
{
unsigned int i, j; //#define wPolynom 0xA001
unsigned int wCrc = 0xffff;
unsigned int wPolynom = 0xA001;
/*---------------------------------------------------------------------------------*/
for (i = 0; i < iBufLen; i++)
{
wCrc ^= cBuffer[i];
for (j = 0; j < 8; j++)
{
if (wCrc & 0x0001)
{ wCrc = (wCrc >> 1) ^ wPolynom; }
else
{ wCrc = wCrc >> 1; }
}
}
return wCrc;
}
Pour les clients utilisant des capteurs dans un environnement ROS, des pilotes spécifiques fournis peuvent être utilisés. Le package de pilotes ROS peut être obtenu comme suit :
Visitez : www.hinson-xs.com |
Contactez le personnel de vente et d'assistance technique de Hinson |
Visitez Gitee : https://gitee.com/hinson-xs/hins_he_driver.git
|
Lorsque le capteur ne fonctionne pas normalement ou que son état ne peut pas être déterminé, reportez-vous au tableau suivant pour le diagnostic et la confirmation des défauts.
Le capteur laser indique l'état de défaut par le clignotement de la LED :
Clignotement de la LED (fois) |
Description du défaut |
0
|
État normal du capteur
|
1
|
Erreur de signal du codeur du capteur
|
2
|
Pas de signal de carte de réception
|
3
|
Erreur de données de mémoire
|
4
|
Erreur de connexion
|
5
|
Erreur de simulation
|
6
|
Protection contre les surtempératures
|
7
|
Protection contre les sous-tensions d'envoi
|
8
|
Protection contre les surtensions d'envoi
|
9
|
Protection contre les sous-tensions d'entraînement
|
10
|
Protection contre les surtensions d'entraînement
|
11
|
Protection contre les sous-tensions de réception
|
12
|
Protection contre les surtensions de réception
|
Période de garantie 9.1
Le capteur est fourni avec une garantie limitée. Pendant la période de garantie, si le produit ne peut pas être utilisé normalement en raison de problèmes de qualité ou de défauts de conception, nous fournirons une maintenance après-vente gratuite.
Période de garantie : 2 ans à compter de la date de vente.
Champ d'application de la garantie 9.2
Les produits sous garantie qui répondent aux conditions de garantie seront réparés ou remplacés gratuitement.
La garantie et le service après-vente de ce produit sont limités à la Chine continentale ;
* Produits impossibles à utiliser normalement en raison de dommages survenus pendant le transport ;
* Produits impossibles à utiliser normalement en raison de dommages aux composants eux-mêmes ;
* Produits impossibles à utiliser normalement en raison de défauts de conception ;
9.3 Champ d'exemption
* Veuillez prêter attention aux conditions suivantes lors de l'utilisation du produit ; nous ne fournirons pas de service après-vente et de garantie gratuits.
* Dommages causés par une installation incorrecte du produit conformément au manuel ;
* Dommages causés par l'utilisation du produit dans des environnements et des conditions inadaptés ;
* Dommages causés par le non-respect des spécifications du manuel du produit ;
* Démontage ou réparation non autorisé du produit sans l'autorisation de la société ;
* Dommages causés par des catastrophes naturelles, des incendies et d'autres forces extérieures irrésistibles.
9.4 Support technique
En cas de défauts non résolus, veuillez nous contacter comme suit.
Téléphone : +86-757-22218956
E-mail : lixianjiao@hinson-xs.com
Site Web de l'entreprise : www.hinson-xs.com
Fabricant : Guangdong Hinson Technology Co., Ltd.
Table des matières
1.1. Précautions relatives à l'environnement applicable
1.2. Précautions relatives à l'environnement de câblage
1.3. Précautions relatives à l'environnement de débogage
2. Introduction de la fonction
4.2. Description des composants
5.1. Ports de quantité d'alimentation et d'interrupteur
5.2. Connexions de signaux d'entrée et de sortie
5.2.1. Connexion du signal d'entrée
5.2.3. Câblage du signal de sortie
6. Configuration des fonctions
6.1 Préparation du périphérique
6.2. Connexion entre le capteur et le logiciel de configuration
6.2.1. Ouvrir le logiciel de configuration
6.2.4. Édition graphique du canal de détection
6.2.6. Coordonnées et leurs valeurs angulaires
6.2.7. Affichage de l'état de numérisation
6.2.8. Surveillance des entrées et des sorties
6.2.10. Paramètres multi-échos (pour FE-XXXXXFA uniquement)
Description des données du capteur 7.
7.1. Système de coordonnées du capteur
7.2.1. Filtrage de l'environnement et distance minimale
7.2.2. L'impact de la surface de l'objet sur la mesure
7.3. Transmission de données Ethernet
7.5. Acquisition du pilote ROS
Champ d'application de la garantie 9.2
Solutions pour votre secteur, prêtes pour vos choix

Hinson
Guangdong Hinson Technology Co., Ltd.
Aider les clients à devenir des leaders de l'industrie
Fournisseur de solutions de détection et de contrôle de l'automatisation industrielle
Numéro public WeChat
Conseil aux entreprises
Service d'assistance
Bâtiment 8, Shengyue Garden, 33 Shunye East Road, Xingtan Town, district de Shunde, ville de Foshan, province du Guangdong
(Parc industriel de machines de Shunde)